


Application research of ultra Short baseline system in ROV underwater positioning
I. Overview
Before the implementation of underwater firefighting operations, wreck salvage and other rescue tasks, the primary task is to accurately locate the underwater target and understand the underwater situation. The underwater location of shipwrecks and other submerged objects is a key and difficult operation. The underwater location is generally determined by using sonar ship and single (double) boat towing method and underwater exploration by divers on the basis of probability search. As underwater robot technology matures. The use of underwater robot for underwater positioning has been more and more widely used.
UnderwaterVehicle A vehicle of various uses that can swim underwater and carry specific instruments to perform or complete specific tasks. RemotelyOperatedVehicle (ROV), the biggest advantage of this kind of underwater robot is that the mother ship can provide continuous energy for it, so it can work in the water for a long time, and can install the manipulator and other operation tools, so it is widely used.
At present, the common method for underwater positioning by ROV is to use underwater acoustic sensors to measure the position of the ROV body, and supplemented by other attitude sensors to form an integrated navigation system, which can obtain high-precision underwater position information. In this paper, the OceanModulesV8Sii ROV equipped with the naval defense and rescue force is taken as the object to introduce the principle and characteristics of underwater positioning, and analyze the main factors that affect the positioning accuracy performance in the process of operation. To improve the understanding of underwater positioning operations.
2. Ocean ModulesV8 Sil ROV underwater positioning system
Ocean Modules V8 Sii(Search) Identification = identification = identification Intervention I is a multi-purpose, open and modular underwater remote-controlled robot. The robot can carry a variety of sensors and devices. Such as a variety of fixed installation cameras, arched transparent cover installation cameras, HD cameras and static cameras, halogen lights, LED lights, sonar, manipulator and various sensors, according to the needs of the user's work can be configured into a professional, perfect underwater carrier.
The Ocean ModulesV8Sii can be installed on large and medium salvage rescue ships and perform important tasks such as rescuing ships (boats), aircraft, missiles, torpedoes, and sunken objects of economic and strategic value in coordination with other equipment at 300 meters. Through the configuration of underwater operation tools, can carry out a variety of submarine rescue underwater operation; Through the configuration of underwater cameras, sonar and other equipment. Can carry out underwater search, underwater observation and other operations.
Underwater positioning utilizes the Ultra Short Baseline Positioning System (USBL). This type of USBL is manufactured by Tfitech Micron Nav. The hardware part is composed of underwater sensor assembly, surface sensor assembly and signal interface box, as shown in Figure 1. In the underwater sensor assembly, the main part is the transponder of short baseline positioning sonar; In addition, incline sensors are included to measure the roll and trim of the AUV body; Electronic compass, used to determine the heading Angle: The pressure sensor determines the depth of the robot by the difference between the pressure at its position and the pressure at the surface. The main part of the surface sensor assembly is the short baseline positioning sonar 5 hydrophones, in addition, also includes inclination sensor, pressure sensor and electronic compass measurement signal receiver. The input port of the signal interface box is directly connected to the surface sensor assembly, and the output port can be connected to the background portable computer through RS232 / Rs485 bus. The accurate underwater positioning can be carried out through software processing, and the input can be via GPS signal. The realization of underwater navigation, route tracking and other functions, the process and hardware structure frame and network are shown in Figure 2. The underwater positioning system works at a depth of 750m, typical horizontal tracking distance is 500m, typical vertical distance is 150m, distance accuracy: ±2m, direction accuracy: ±3. , working beam width: 180. Location upload rate: 0.5s to 10s.

Figure 1 Ultra short baseline positioning system components
3. ultra short baseline underwater acoustic positioning principle
Electromagnetic and light waves can be used to observe distant planets, but can not be used to remote survey tens of meters deep sea floor, because the sea water has a strong absorption of electromagnetic and light waves. At present, sound waves are an effective means to detect and locate objects in water. Acoustic positioning systems were developed in the 1860s to support underwater research. Since then, such systems have been towed. ROV plays an important role in locating underwater targets.
In the acoustic positioning system, according to the size of the receiving array or the baseline length of the transponder array to classify, underwater acoustic positioning technology can be divided into: long baseline positioning (LBL), short baseline positioning (SBL) and ultra short baseline positioning (USBL), some modern positioning systems can use a combination of the above technology.
The array length of long baseline underwater acoustic positioning system ranges from several kilometers to dozens of kilometers. Long baseline positioning can provide high precision position in a wide area. It requires an array of at least three transponders to be deployed at known points on the ocean floor, with a single transducer installed at a target location on the surface. The coordinate position of the target is calculated by using the slant distance of the signal sent by the target to each primitive of the receiving array. The short baseline underwater acoustic positioning system requires at least 3 transducer arrays to be installed on the target element to be located on the surface of the water. The length of the arrays is generally within a range of several meters to tens of meters, and the position relationship between the transducers is known. The time difference between the signal sent by the target and each element of the receiving array is used. To figure out where the target is. The array length of the ultra short baseline underwater acoustic positioning system is generally in the order of several centimeters to tens of centimeters, which is the phase difference between the received signals of each primitive to solve the orientation and distance of the target.
These are three different ways of acoustical positioning systems. Long baseline positioning (LBL) has the highest positioning accuracy, but it is difficult and expensive to locate known points with high precision. It is generally used in oil platform monitoring, underwater archaeological salvage and other projects requiring high precision positioning. Short baseline positioning (SBL) requires hull modification. In order to place the transducer array, the application of short baselines is limited by the requirements of the ship. Therefore, the advantage of the ultra-short baseline acoustic positioning system (SSBL) is clear: only one transducer and its electronic unit need to be installed on the ship. It can provide high precision acoustic positioning.
The principle of ROV dynamic positioning using the simplest ultra-short base array composed of three hydrophones is shown in Figure 3. Among them. A beacon is installed on the ROV carrier, and the acoustic inquiry signal is transmitted by the underwater acoustic receiving array. After receiving the inquiry signal, the beacon returns the response signal after a fixed time delay. The deviation between the m ROV and the mother ship can be calculated by measuring the time the sound waves travel through the water. At the same time, the phase difference between each receiving transducer in the receiver array is measured. The position of the underwater vehicle relative to the mother ship can be calculated.
A right triangle matrix is adopted, the spacing of matrix elements is d, the X-axis points to the bow direction of the mother ship, and the coordinates of the three primitive elements are: (d, O, 0), (0, 0, 0), (0, d, 0); The target coordinate is: T (x, y, z). Taking No. 2 primitive as the basis, the phase difference of the sum of the other two primitives can be obtained:

The slant distance r between the origin of coordinates and the target is:
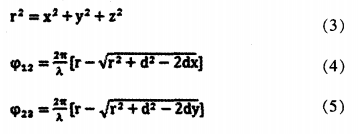
Note that r≥d, expanded by Taylor technique,
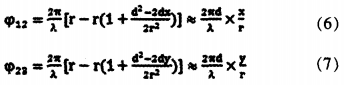
In equation (6,7), ψI2 and ψ22 are the phase difference between the signals received by the two hydrophones and the reference primitive respectively, which can be measured. Is the wavelength of sound wave in water. The Z coordinate can be measured by the depth sensor, so the ROV underwater position (X, Y, Z) can be calculated by using the above equation.
If the system is equipped with GPS positioning system. The ROV can also be configured with a route of movement. It can realize automatic routine detection and other functions.
Iv. Error analysis of ultra-short baseline underwater acoustic positioning system
The main error sources of underwater positioning include the ranging error of ultrasheminar base array, the error caused by the phase difference of ultrasheminar base array, the error caused by acoustic propagation, the error caused by acoustic noise, the error caused by underwater working environment, and the error caused by the change of carrier motion velocity.
The error of distance measurement is mainly caused by the error of time measurement, which is closely related to signal-to-noise ratio and sound velocity. In the process of sound wave propagation under water, the accuracy of time measurement will be affected by sound speed, bending of sound line and reflection of water surface, while the diffusion and absorption of sound wave and ambient noise will affect the signal-to-noise ratio. Therefore, the ranging error is mainly caused by hydroacoustic factors, and the working conditions and methods of underwater positioning directly affect the positioning accuracy.
The positioning accuracy of the ultra short baseline positioning system is determined by the distance between the measured carrier and each transponder and the geometric accuracy of the transponder array. The slant distance r of the target to the array is a function of the speed of sound in water C and the time of query 1 response. The sound velocity c is related to the depth, salinity and temperature of the seawater in the area where the array is located, so using the average speed of sound wave propagation in the water to calculate the distance will lead to a large error. To measure the distance exactly. Must be based on the sound velocity profile of the working area. To calculate the track of sound line, the accurate relationship between the carrier and each transponder is obtained.
V. Summary
As drones, unmanned vehicles and robot soldiers gradually show more and more power on the battlefield, the development of unmanned warfare has presented a relatively clear blueprint. Similarly, in the water fire operation, salvage engineering and other operations. Unmanned underwater operations should also become a trend. At present, the OceanModulesV8Sii underwater vehicle configured by the defense and rescue forces has played an important role in various underwater operations. It can be predicted that more and more underwater vehicles will play an increasingly important role in the near future.