


Design of an adaptive ultrasonic sensor model
Ultrasonic detection is rapid, convenient, simple calculation, easy to achieve real-time control, and in the measurement accuracy can meet the requirements of industrial practical, so it has application prospects in industry. However, the information obtained by ultrasonic sensor in practical application has certain uncertainty, mainly due to the large detection beam Angle, poor directivity, specular reflection, scattering and crosstalk of ultrasonic wave. Especially in the corner or some complex environment, the mirror reflection of sound wave on the object surface is the biggest problem that sonar meets in the actual environment. Specular reflection is when sound waves emitted at a specific Angle are reflected off the surface of a smooth object and therefore cannot be returned, so the ultrasonic sensor ignores the presence of the object or produces a distance reading that is larger than the actual distance. Based on the fuzzy theory, this paper analyzes and deals with some uncertain information in the ranging process of ultrasonic sensor, and uses the contradiction factor of distance influence factor (RCF) to give an adaptive ultrasonic sensor model, which can accurately describe the location of obstacles in the range of ultrasonic detection.
1. Ultrasonic uncertainty information
Under ideal conditions, the measurement accuracy of sonar is satisfactory. However, in the real environment, there are great uncertainties in sonar ranging results, which are mainly manifested in the following aspects:
(1) Scattering characteristics of ultrasonic waves
The acoustic wave emitted by ultrasonic wave has a scattering Angle a, as shown in Figure 1. The ultrasonic wave can perceive the obstacle in the fan-shaped area, but cannot determine the exact position of the obstacle. In the figure, P is the distance between the obstacle and the ultrasonic wave; Is the included Angle between the obstacle and the ultrasonic axis; r is the ultrasonic measurement value.
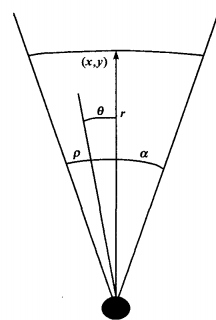
Figure 1 Scattering of sonar
(2) ultrasonic reflection
When a sound wave hits a reflecting object, any measured reflection retains only part of the original signal, and some of the remaining energy is absorbed or scattered or passes through the object depending on the surface material and the Angle of incident. Sometimes sonar does not even receive the reflected signal. It may be that the sonar signal has been reflected and lost several times in the noisy environment, so that it has been lower than the receiver response threshold when it finally returns, or it may be that the human emission Angle is too large, so that all the signals are reflected to other directions and cannot be received by the receiver. The result of specular reflection ranging may be that the obstacle is not detected or a distance value greater than the true value is detected.
2. Creation of ultrasonic mode based on fuzzy theory
2.1 Uncertainty function of ultrasonic measurement
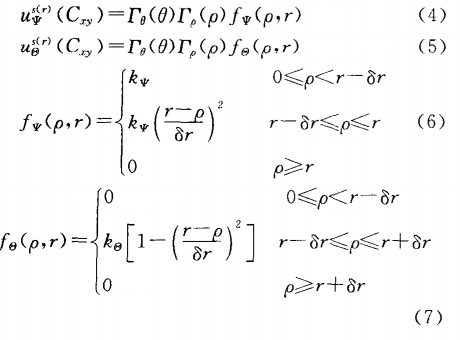
According to the characteristic analysis of ultrasonic scattering, the probability value of obstacle exists at the center line of arc is the maximum. Therefore, two functions are introduced to represent the uncertainty of ultrasonic measurement:

Where, c is a constant, representing the smooth transition point of ultrasonic information from certainty to uncertainty;
According to image.png, the closer the location is to the central axis, the higher the density of sound wave is, while the density of sound wave at the edge drops to 0. Therefore, the smaller the Angle between the location and the central axis of ultrasonic wave, the higher the reliability will be.
png indicates that the farther away from the ultrasonic wave, the lower the reliability, while the closer to the ultrasonic wave, the higher the probability of correct measurement.
2.2 Creation of model based on fuzzy logic method
In real environment detection, the range of ultrasonic detection is discretized into a set of rectangular grids of the same size, m×n(m is the length of the rectangle, 7"1 is the width of the rectangle), each grid is represented by c, so that the range detected by sonar is

Two fuzzy sets of the same size as U are defined to represent idle grids and obstacle grids respectively. The conversion model of sonar to fuzzy set is established, and the measured value of sonar is set as r, then
3. Adaptive ultrasonic sensor model
The main factor considered in the above model is the scattering characteristics of sonar sensor, and the characteristics of specular reflection are not too much considered. As discussed in the literature, RCF is applied to the ultrasonic sensor model in the form of multiplication, which has a certain effect in reducing the accuracy of ranging caused by specular reflection. The distance influence factor x is defined as
When R>RMAX

When R is less than RMAX

4 Experiment
The experiment was done indoors by a robot equipped with eight sonars. The ultrasonic sensor used by the mobile robot has an accuracy of 1('171. The sonar detection range is 1O ~ 300cm, and the maximum scattering Angle is l2.5. The size of the rectangular experimental environment for ultrasonic detection is 3m×3m. FIG. 2 shows the ranging test results of ultrasonic sensor. Here the RCF parameters are: r1 0.5, RCFmi 1 0.1, the corresponding r 1 1/9, R 1 3In. In order to show clear, the size of the grid used in the ranging experiment is 1mm×1mm, and only the existence of obstacles in the grid is displayed in the figure. Figure 2(b) automatically modifies the ultrasonic model by introducing contradictory factors.

(a) Experimental drawings of ranging without the use of an adaptive ultrasonic sensor model
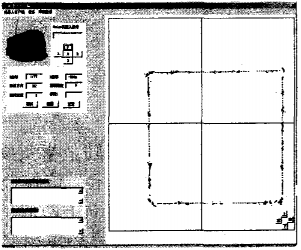
co) Ranging using an adaptive ultrasonic sensor model
Figure 2. Experimental results of ranging of ultrasonic sensor
As can be seen from Figure (2), in the process of ultrasonic model ranging based on fuzzy theory, the sensor model is insensitive to inaccurate distance information, resulting in a large number of invalid data, especially at the corner. At the corner, the specular reflection of the ultrasonic wave is obvious; The adaptive ultrasonic model can eliminate some large distance data well, and the effect is more obvious at the corner, so as to improve the accuracy of ultrasonic ranging.
5 Closing Remarks
In this paper, based on the analysis of the measurement characteristics and uncertain information in the process of ultrasonic ranging, the model of ultrasonic sensor is established with the fuzzy logic theory, which can solve the uncertain information caused by ultrasonic scattering well. In order to solve the uncertainty information caused by ultrasonic specular reflection, the contradictory factor is introduced, which can automatically change the value of the distance influence factor, and dynamically modify the ultrasonic sensor model, which provides the basis for the accurate ranging and application of ultrasonic wave.
References:
[1] Guo Jianzhong, Lin Shuyu, Cao Hui, et al. High Speed Sampling System for Ultrasonic Detection Based on TMS320VC5402 [J]. Piezoelectricity & Acoustooptics, 2007, 29 (2) : 173 -- 175. GUO Jianzhong, LIN Shuyu, CAO Hui, eta1. A high speed sampling system for ultrasonic detection based onTMS320VC5402[J]. Piezoelectrics& Acoustoop -- tics, 2007, 29(2) : 173 -- 175. (in Chinese)
[2] Luo Zhong, Liu Hongyi, Wang Fei, et al. Experimental study on Ultrasonic Detection of unknown Environment Surface [J]. Journal of Northeastern University (Natural Science Edition), 2008, 29(2) : 266-269. LU0 Zhong, LIU Hongyi, W ANG Fei, eta1. Experi -- mentalstudyon ultrasonicexploration in unknown en -- vironment[J]. JournalofNortheastern University (NaturalScience), 2007, 29(2) : 173 -- 175.
[3] Peng Cuiyun, Zhao Guangyao, Rong Hailong. Design of Ultrasonic Ranging Module in Vehicle Reversing System [J]. Piezoelectricity & Acoustooptics, 2008, 30(2) : 251 -- 254. PENG Cuiyun, ZH AO Guangyao, RONG Hailong. Peng Cuiyun, zh AO Guangyao, Rong Hailong. The design of ultrasonic distance-measuring system used on car-backing system. The design of ultrasonic distance-measuring system used on car-backing system. [J]. Piezoelectrics & Aeoustooptics, 2008, 30(2) : 251 -- 254. (in Chinese)
[4] ELFES A, MORAVEC H.High resolution maps from wide-anglesonar[C] / / StLousi: IEEE Interna -- TionalConference Roboticsand Automation, 1985:116 -- 121.
[5] LIM JH, CHO D baron pecularreflectionprobability inthecertaintygridrepresentation [J]. Transactionsof theASM E, 1994,116 (3) : 512-520.
[6] RIBO M, PINZA. A comparisonofthreeuncertainty ealculiforbuildingsonar - basedoccupancygridsFJ]. Robotics and Autonomous Systems, 2001, 35(3-4) : 2O1 -- 2O9.
Uncertain Sensing Information Processing in Mobile Robot Map Creation [J]. Acta Automatica Sinica, 2003, 29(2) : 267 -- 274. W ANG W emua. CHEN W eidong, XIYugeng. Chen W Eidong, Xiyugeng. Un - certaintysensorinformation processinginmapbuilding ofmobilerobot [J ~ AetaAutomaticaSinica, 2003, 29 (2) : 267-274.
[8] ZOU Yi, KHING H Y, SENG C C, eta1. Multi -- ul -- trasonicsensorfusion formobilerobots[C] / / Dear -- born: Proceedingsofthe2000 IEEE IntelligentVehi -- elesConference, 2000:387 -- 391.