


Omnidirectional tilt sensor and its signal processing technology
A micromechanical tilt sensor is used to form the front sensing circuit, and a digital signal circuit is used to form the digital signal circuit. The extraction of inclination voltage signal, Kalman digital filtering algorithm, zero drift suppression and omnidirectional signal synthesis are completed, and the carrier can realize any yaw direction (0. ~ 360.) Lower full square dip Angle measurement. The slanting signal is processed by Kalman digital filtering algorithm, and the slanting signal is denoised and suppressed by simulation software. Aiming at the zero drift problem of the system, a software algorithm is designed to track zero drift and eliminate zero error. The results show that the stability of -z and Y-axis is improved by 10 percentage points respectively. 9 times, 5 times and 12.75 times, to meet the nonlinear degree requirements.
0 Introduction
Inertial technique is an applied technique to measure and control the attitude and trajectory of moving objects by using Newton's classical mechanics and modern physics principles. The main research contents include inertial table, inertial system, inertial navigation, inertial guidance, inertial measurement and so on. Inertial sensors are the core components of guidance, navigation and weapon alignment systems. Tilt sensor is widely used as a habitability device. In the military, it is mainly used in high-precision vehicle radar automatic leveling system, tank fire control system and other fields. In the civil aspect, it is mainly used for drilling exploration, exploration well, transportation track survey, geodetic survey, dam, earthquake monitoring and so on.
At present, the Angle measurement method of accelerometer is generally used to measure the Angle tilt Angle. The measurement principle is based on the sensitivity to the direction of gravity, and the component of the degree of gravitational acceleration is measured on the two axes of the accelerometer. Determine the inclination Angle of the accelerometer from the Angle. The inclination sensor has the characteristics of high precision, stable performance, high reliability and easy to use. In practical applications, it is necessary to use the inclination sensor to ensure that the measured carrier can accurately transmit the inclination signal when it deflects in any direction. This is of great significance to ship attitude control and buoy control.
In this paper, two high-precision micro-mechanical (EMMS) single-axis tilt sensors SCA 103t-d04 are selected as sensing components and placed vertically. By filtering the original dip signal, zero-drift suppression processing and full square dip signal synthesis, the full square dip signal measurement results are obtained. The Kalman digital filter and zero tracking algorithm are studied by using computer software, and the digital filter algorithm is simulated by MLB.
1 Structure principle
1.1 Principle of all-round measurement
A single-axis tilt sensor is sensitive to the Angle of tilt of an object rotating along a specified horizontal axis on a horizontal plane. However, the tilt of the carrier can be any azimuth around the horizontal plane (level 0). ~ 360). Therefore, it is necessary for the sensor to be able to detect the inclination Angle of the carrier at any deviation Angle, that is, the all-round inclination measurement].
Figure 1 shows the relationship between the tilt Angle (O-x O-y) of the tilt sensor and the horizontal line scale system and the coordinate system (O-x y) in which the sensor is located. As can be seen from Figure 1, the horizontal line rotation axis of the inclination sensor is located in the x-O-y plane of the horizontal line scaling system, and the square Angle relative to the O-x axis is a(0). ~ 360); Inclination 0 is the Angle between the plane normal measured by the sensor and the z axis, that is, the 0 of the horizontal plane or carrier. The Angle between the two axes z and Y of the plane to be measured and the projection axes z and Y of the horizontal plane is 0 and 0y respectively, and the Angle between the normal axis z of the plane to be measured and the normal axis z of the plane to be measured and the horizontal plane is 0. At the same time, the relationship between the input base axis perceived acceleration a (i), z, Y axis) of the inclination sensor and the base axis inclination 0 is

Where: g is the component of gravitational acceleration on the reference axis when the reference axis inclination Angle is present; g is acceleration of gravity [7]. If the two input datum axes of the sensor are in the direction of z and Y respectively, and the acceleration in the direction of the input datum axis is a and n respectively, then the fraction of the gravitational acceleration in the coordinate system x, y plane is

The relation between acceleration and inclination can be obtained by substituting equation (2)
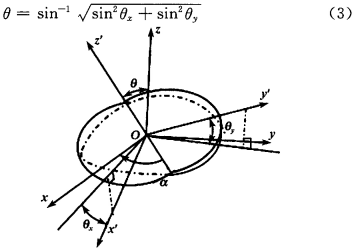
FIG. 1 Schematic diagram of all square tilt Angle coordinates
In this paper, single-chip microcomputer is used for signal software processing. However, to solve the tangent function and the inverse tangent function of the signal requires a lot of memory and high computing speed. Therefore, approximation algorithms are generally used in practice. When 0 is small, the inclination of the plane to be measured is

For obtaining the all-directional inclination signal, it can be calculated according to formula (4), that is, the square sum of the Y-axis inclination signal can be taken.
1.2 System signal processing structure
The omnidirectional inclination measuring system includes a sensing circuit, a signal processing circuit and an output circuit. The sensitive circuit consists of two SCA 103t-d04 chips placed vertically against each other and is sensitive to inclination signals. sca103t-d04 is a high-precision single-axis inclinometer developed by VTI Technology of Finland. It uses the differential measurement principle and uses the highly integrated M-E-M-S sensor technology. Provides level performance of level measuring instruments. M E M S sensor has been widely used for its advantages of small size, light weight, low price, high reliability and large output. It has 2 mode outputs and 1 digital SIPI interface, providing direct signal processing. In the system, Z-axis and Y-axis tilt signals are provided by two SCA 103t-d04 chips placed together vertically, and the differential tilt signals of X axis and Y axis are divided into z axis and Y axis, and A total of 4 modes of pseudo-tilt voltage signals are realized by A/D sampling and differential calculation through the MCU. The advantage of poor signal is that it can improve the sensitivity of the product and significantly reduce common mode noise. The output of the Y-axis is used to synthesize a complete square tilt Angle signal.
In the part of digital circuit, this paper chooses aduc812 single chip computer of AD company, which is a kind of high performance data acquisition system. The MCU core consists of an 8-channel 12-bit high-precision self-calibrating ADAC, two 12-bit ADacs, and a programmable 8-bit (8051 compatible)MDAC u. The digital circuit completes sampling, filtering, zero suppression, synthesis of omnidirectional Angle signal and high precision D/A conversion, and generates omnidirectional Angle position and attitude state Angle signal. The original block diagram of the signal processing circuit is shown in Figure 2.
2-bit filtering and zero drift suppression
The sensor's sensitive signal is converted to A/D by a single chip computer system, and processed by Kalman filter and zero drift suppression.
2.1 Implementation of Kalman filter algorithm
The initial inclination signal of the system after measurement contains noise signal, which leads to signal fluctuation and poor stability. In order to understand this problem, we use a digital filtering method - Kalman filtering. The Kalman filter is an estimation problem based on the minimum mean square error criterion, describing a linear system where the root-mean-square error between the expected output and the actual output is minimized when the input is a random signal generated by white noise [5]. It is a sequential real-time recursive calculation method based on "prediction once measured once corrected". Suppose that the state equation and measurement equation of a random linear dispersion system are respectively

Where: x (K) is the state matrix of the system at time K; U (K) is the system noise matrix; A and B are two parameter matrices; Z (K) is the measured value; H is the measurement system parameter matrix; V (K) is the observed noise matrix. The recursive calculation formula of Kalman filter is as follows:

In this paper, the differential signals of z and axis are separated into Kalman number filters. Since the filtering is carried out in the case of unknown system truth value, the nearest measured value seems to be the original system truth value, so in the process of approximation, it is possible to remove the noise signal and retain the original basic signal. When evaluating the filtering effect, the fidelity of the tilt signal and the reduction of its wave activity should be mainly considered [8]. In this paper, MAS T-L AB software is used for simulation analysis. In the test process, the original Z-axis and Y-axis inclination signals after sampling and difference are processed by Kalman filter designed by MAS T-L AB, and the output waveform and its standard deviation are analyzed.
In order to verify the processing effect of Kalman filter, Y-axis static measurement data are tested respectively. In this paper, the pre-filtered and post-filtered signals are obtained by comparing the original signal with the Kalman filtered signal. The data comparison curves of z axis and Y axis are shown in Figure 3 and Figure 4. Table 1 shows the standard deviation comparison between the raw data and the Kalman filtering method.
As can be seen from FIG. 3 and FIG. 4, after filtering, the random noise of the system is significantly reduced, the fidelity and stability of the output signal are significantly improved, and the stability of the Y-axis is increased by 10. 95 times and 12... Seven times, five times.
2.2 Zero drift suppression design
The sca103t-d04 single-axis tilt sensor has time drift and temperature drift during operation, which will affect the zero output of the tilt Angle detection system. In the actual process of welding the circuit, installation errors will occur, and the zero position of the shadow inclination detection system will be output. The zero drift suppression thinking software is used to correct the problems in the system in real time. The software flow chart including Kalman filter algorithm and zero drift suppression is shown in Figure 5.
4 Summary
The sensitivity principle and system signal processing technology of all-square tilt sensor are introduced. The sensor component of the inclination measurement system is SCA103T-D04, and the signal processing part is separated by ADUC812 chip. The Kalman filter algorithm is used to reduce the noise in the inclination signal and improve the stability of the inclination signal. The results show that the stability of the z and Y axes is improved by 10%. 9. 5 times 12. Seventy-five times; In order to eliminate zero error, meet the requirement of sensor nonlinearity and improve the accuracy and reliability of the measurement system of all-square inclination sensor, a software algorithm of zero drift suppression is designed.
Quote:
[1] Wang Wei. Research status and development trend of inertial technology [j]. Acta Automatica Sinica, 2013,39(6): 723 -- 729.
[2] Song Hai-ling, Ma Yi-qing. The development and application of inertial technology need to be analyzed. Modern Defense Technology, 2012,40(2):55-59.
[3] Lu Hao, Wei Xiaofeng, Pang Xiuzhi. Application and development of inertial technology in precision guided weapons [J]. Electro-optics and Control, 2007,14(3):45-47. (Chinese)
[4] Zhu Bin, Zheng Juan. New progress of inertial navigation guidance technology in the United States [J]. Chinese Aerospace Science, 2008(1):43-45.
[5] Zhang Yanyu, Shi Zhenbin, Li Shiguang, et al. Design of a new inclination sensor [J]. Science and Technology Innovation Herald, 2013(22):63.
[6] Pu Linhua, Cui Xuemei, Wang Wang, et al. Research on Omni directional horizontal attitude Sensor of Micromachinery [J]. Piezoelectricity & Acoustooptics, 2012,34(2): 207-209.
[7] Lin Yu, Pu Linhua, Zhang Fuxue. Structure principle of omnidirectional gas inclination Angle sensor [J]. Electronic Components and Materials, 2006,25(5): 19-22.
[8] Guo Yingshi, Wang Chang, Zhang Yaqi. Analysis of influence of noise Variance on Kalman filtering results [J]. Computer Engineering and Design, 2014,35(2):641-645.
[9] Guan Ji. Simulation and implementation of Kalman filter [J]. Southeast Transportation, 2014(6):17 8-1 81.
[10] Liu Aihua, Li Denghua, Dong Bicheng. Design and implementation of high-precision Biaxial inclination detection device [J]. Journal of Beijing Information Science and Technology University (Natural Science Edition), 20,13,28(5):51-55.