


Design of ultrasonic sensor to improve measurement accuracy
Introduction
Ultrasonic sensor uses the principle of piezoelectric effect to convert electric energy and ultrasonic wave into each other, which is divided into transmitter and receiver, with a frequency of about 40kHz. When the ultrasonic wave is emitted, the electrical energy is converted to emit the ultrasonic wave; Upon receiving the wave, the ultrasonic vibration is converted into an electrical signal. Ultrasonic sensors are commonly used for ranging.
1. The comparison distance method is proposed
To compare the sizes of AC and BC, see Figure 1. If the ultrasonic ranging method is used, the principle of ranging is generally the time difference method, that is, to measure the total time experienced by the ultrasonic wave from the launch to the obstacle return, and then multiplied by the ultrasonic speed to get twice the distance between the source and the obstacle, that is:
L=vt / 2 (1)
Where: L the distance between the sensor and the obstacle; V one velocity of sound waves in a medium.
You measure the length of AC and BC in this way, and you get the result. According to formula (1), ranging error is mainly caused by the propagation speed and propagation time t error, if the measurement accuracy requirements are slightly higher, it is necessary to correct the final results, for example, in order to reduce the impact of temperature on the speed of sound, it is necessary to do temperature compensation, the circuit is more complex, the error is generally centimeter level... .
In this paper, we propose a novel design which can compare distances with high precision by using a very simple circuit, completely avoiding the error caused by propagation speed and propagation time. First of all, the purpose of this design is not the length itself, but the key is the comparison of length. We install an ultrasonic transmitter at c, and A matching ultrasonic receiver at A and B respectively. The problem can be summarized as: from the same ultrasonic transmitting source c transmitting signal, two ultrasonic receiving source A and the order of the signal received, if the first day to receive the signal, it is BC<AC, so the key to design the circuit is to detect the sequence of two receivers receiving signals.

Figure 1 Length comparison
In this paper, we propose a novel design which can compare distances with high precision by using a very simple circuit, completely avoiding the error caused by propagation speed and propagation time. First of all, the purpose of this design is not the length itself, but the key is the comparison of length. We install an ultrasonic transmitter at c, and A matching ultrasonic receiver at A and B respectively. The problem can be summarized as: the transmission signal from the same ultrasonic transmitting source c, two ultrasonic receiving source A and the order of the day to receive the signal, if the first day to receive the signal, it is BC<AC, so the key to design the circuit is to detect the order of the two receivers to receive the signal.
2 Circuit Design
Ultrasonic transmitting circuit has software and hardware two methods, this design is the software method, the circuit can refer to the literature. When considering the ultrasonic receiving circuit, we first consider the general and convenient infrared remote control receiving chip CX20106. When CX20106 receives signals consistent with its center frequency, pin 7 will output low level. Considering the difference of low level received by two receiving chips, the difficulty is as follows:
1. The difference between the first waveform received and the second waveform with the same phase cannot be distinguished;
2. Through the actual test, when the difference between BC and AC is 10mm, the difference between the two output low levels cannot be observed on the oscilloscope. Therefore, the second scheme is terminated.
After the following simple analysis:
The ultrasonic sensor transmits waves at 40kHz. That is, the period:
T is equal to 25 times 10 minus 6 S.
With sound speed of 340m/s, the distance of a 40kHz ultrasonic wave is:
L: 340 ×25 ×10-6 = 8.5mm =8.5 ×10-3m
If we want to compare the distance between AC and BC with high accuracy, we need to be able to accurately judge the order of arrival of A and B. Here are two problems to be considered:
(1) The circuit can judge whether the two receivers receive signals of the several cycles transmitted by the transmitter. For example, A receives signals of 3 cycles, B receives signals of 2 cycles, and A is naturally close to the transmitter:
(2) The waveform difference received by A and B receivers is within one cycle, and it is necessary to judge who is first and who is second.
The circuit designed below can meet the above two requirements with higher accuracy, as shown in Figure 2.

Figure 2 Signal processing diagram
The MCU transmits ultrasonic waves of more than 8 cycles of 40kHz, and the attenuation degree of ultrasonic wave propagation in the air increases with the increase of the propagation distance. Therefore, the signal received by the receiving head is relatively weak and cannot be directly sent to the post-stage processing. After receiving the signal, the ultrasonic receiver A and B use the symmetrical circuit to amplify the signal processing. And the amplified sinusoidal signal into pulse signal A, B, respectively as the counter A, B counter count impulse, counter A, B calculate the number of signal cycles received by the ultrasonic receiver, when a counter first recorded to 1000 (that is, the receiver received 8 ultrasonic waves), or gate output from 0 to 1, At this time, the data of the counter is output by D flip-flop, and the microcontroller determines the size of the distance by the size of the data transmitted by D flip-flop.
3 Result Analysis
According to the above circuit diagram, A and B signals are analyzed, as shown in Figure 3.
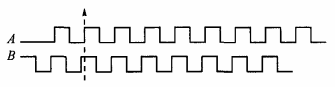
Figure 3 Waveform analysis with a difference of more than one cycle
In the above analysis, 9 cycles of ultrasonic waves are transmitted continuously. When the receiver A receives the waveform of 8 cycles, that is, when the 8th rising edge of counter B arrives, the counter says that the 7th rising edge has not arrived, so at this time or gate changes from 0 to 1, and the rising edge reaches the D flip-flop. At this time, the data obtained by the single chip microcomputer is: Route A is 8, route B is 6; It can be judged that the transmitter is close to the receiver A and far from the receiver B, AC < BC, which is the case that the distance between the two exceeds one cycle. When the distance between the two is less than one cycle, see Figure 4.
While giving higher vocational students more opportunities, of course, the IT industry requires constant updating of professional skills and a short and fast period of industrial transformation, which is undoubtedly the most direct Threat to students majoring in IT in higher vocational colleges. Therefore, students must constantly open up new professional fields in the process of entrepreneurship. Absorb new technology and knowledge, constantly charge, promote the development of enterprises, bring new vitality. Facing the background of fierce market competition and constant change of technical knowledge, they must have further career planning and higher professional quality to adapt to the development of the industry.
From the perspective of innovation and entrepreneurship, this paper analyzes that S, W, O and T of IT major students are both independent and co-existing. Students must be aware of various threats, grasp opportunities, exploit strengths and avoid weaknesses, and accumulate more practical experience in innovation and entrepreneurship in light of changes in social needs, IT enterprises, schools and other situations.
3 Conclusion
At present, there are some mistakes in the teaching process of innovation and entrepreneurship of IT majors in higher vocational colleges. They overemphasize the orientation of market and employment, and neglect the cultivation of sustainable development ability of professionals. Therefore, in the process of entrepreneurship and innovation teaching practice in higher vocational colleges, IT is necessary to conduct in-depth visits and surveys according to the actual situation of the college, and formulate a set of feasible talent training programs for IT majors from the perspective of SWOT analysis of innovation and entrepreneurship and vocational college students' career planning, so as to truly cultivate "high-quality and skilled" talents.
References:
[1] The Ministry of Education. Opinions of the Ministry of Education on Vigorously Promoting Innovation and Entrepreneurship education in Institutions of higher Learning and college students' self-employment [EB/OL]. 2011 -- March 18[2012 -- August 1 l0]. http://jzzsjy.com.cn/jzzj/jy/8how -- article.asp? The id is 346.
[2] Zhao Xueyi. On the Vocational Orientation of Higher Education [J]. Educational Development Research, 2008 (11) : 31 -- 33.
[3] Zhang Wanqiu. SWOT Analysis of Vocational College graduates' Entrepreneurship: A Case Study of Beiwan Economic Development Zone in Guangxi [J]. Journal of Hunan Vocational College for Nationalities, 2011(6) : 100 -- 103.
[4] Li Tingting. Discussion on Innovation and Entrepreneurship Education Model in Higher Vocational Colleges [J]. China Science and Education Innovation Guide, 2009(3) : 24.